import cv2 #python 3.8 ile sanırım burayı daha kolay çalıştırabiliyorsun. Diğer bilgisayarımda 3.9 da epey bir sıkıntı yaşadım çalıştırırken bilemedim.
import numpy as np
print("cv2 kütüphane import etti")
img = cv2.imread("Resources/tesla_truck.jpg")
print(img.shape)
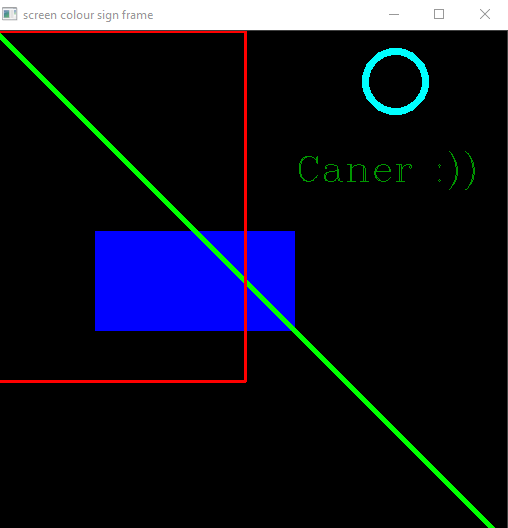
img2 = np.zeros((512,512,3),np.uint8)
print(img2)
img2[200:300,100:300]=255,0,0 # tüm alanı aynı renge boyamak istiyorsan bu şekilde yazabilirsin,
# diğer türlüsü örnekteki gibi olmalıdır. 255,0,0 mavi rengini veriyor
#cv2.line(img2,(0,0),(300,300),(0,255,0),3) #Ekrana sol üst köşeden 300,300 noktasına kadar yeşil çizgi çekti.
cv2.line(img2,(0,0),(img2.shape[1],img2.shape[0]),(0,255,0),3) #sol üst köşeden karşı köşeye yeşil çizgi çekti.
cv2.rectangle(img2,(0,0),(250,350),(0,0,255),2) #Kırmızı dikdörtgen çizgi attı. 2 kalınlığı belirtir arttıkça artar 2 yerine "cv2.FILLED" ibaresi eklenirse içi dolu bir dikdörtgen elde edilir.
cv2.circle(img2,(400,50),30,(255,255,0),5)
cv2.putText(img2, "Caner :))",(300,150),cv2.FONT_HERSHEY_COMPLEX,1.2,(0,150,0),1)
imgResize = cv2.resize(img,(640,480))
print(imgResize.shape)
kernel = np.ones((5,5),np.uint8)
imgGray = cv2.cvtColor(imgResize, cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray,(7,7),0)
imgCanny = cv2.Canny(imgResize,150,200)
imgDialation = cv2.dilate(imgCanny, kernel, iterations=1)
imgEroded = cv2.erode(imgDialation, kernel, iterations=1)
imgCropped = img[0:200,200:400]
cv2.imshow("gray ourcar", imgGray)
cv2.imshow("blur ourcar", imgBlur)
cv2.imshow("canny ourcar", imgCanny)
cv2.imshow("Dialation Image", imgDialation)
cv2.imshow("Eroded Image", imgEroded)
cv2.imshow("Cropped Image", imgCropped)
cv2.imshow("screen colour sign frame",img2)
cv2.waitKey(100) # burada milisecound cinsinden değer giriliyor eğer 0 yazarsan hep açık kalır açık kalma süresini belirliyorsun.
cap = cv2.VideoCapture("Resources/Lane Detection Test Video 01.mp4")
cap2 = cv2.VideoCapture(0)# "0" her hangi bir kameradan görüntü almamıza yarar.
cap2.set(3,640)
cap2.set(4,480)
while True:
success, video = cap.read()
success, video2 = cap2.read()
cv2.imshow("Video", video)
cv2.imshow("CAM", video2)
if cv2.waitKey(1) & 0xFF == ord('q'): # "q"ya basana kadar video kapanmaz, basıldıktan sonra looptan çıkar.
break